Le rôle des parois dans l’émergence d’un comportement collectif dans une assemblée de scarabées vibrants
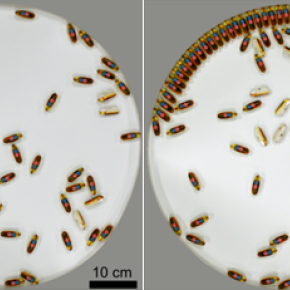
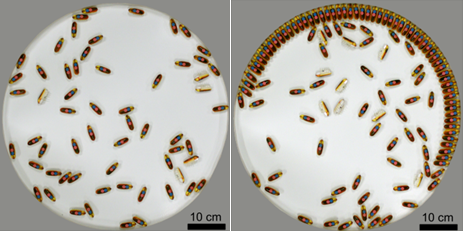
En utilisant comme système modèle une assemblée de petits scarabées mécaniques vibrants, des physiciens ont montré l’émergence d’un comportement collectif lorsque ceux-ci sont suffisamment nombreux. Au-delà d’un seuil critique, ces « mobiles actifs » se regroupent en majorité le long des parois de l’enceinte tandis qu’à faibles nombres, ils se déplacent de manière aléatoire au centre de l’enceinte.
Des physiciens du Laboratoire ondes et matière d’Aquitaine (LOMA, CNRS/Univ. Bordeaux) et du Centre de recherche Paul Pascal (CNRS/ Univ. Bordeaux) viennent de quantifier le rôle des parois dans un système modèle composé d’une assemblée de petits scarabées en plastique dont les vibrations du corps provoquent des déplacements aléatoires. En mesurant comment leur agrégation au niveau des parois dépend de leur nombre et de leur agitation, ils ont montré l’existence de deux régimes : le premier, analogue à un gaz, et le second, où ce gaz coexiste avec des regroupements localisés aux bords de l’enceinte où sont confinés les scarabées. En reprenant l’expérience avec une arène aux parois déformantes et mobiles, ils ont induit un comportement collectif conduisant au déplacement de l’arène. Ce travail est publié dans la revue Physical Review Letters.
Pour cette étude, les physiciens ont utilisé des petits scarabées en plastique de quelques centimètres de longueur munis d’une locomotion propre : ils sont munis de pattes flexibles et les vibrations du corps induisent des déplacements aléatoires. Les chercheurs ont placé dans une arène d’une à quelques dizaines de ces objets et varié leur nombre et leur fréquence de vibration. Ils ont alors observé soit un gaz soit une coexistence entre un gaz et un agrégat de surface. Un diagramme délimitant ces deux comportements est alors obtenu.
Des simulations numériques et un modèle analytique leur ont permis de comprendre quantitativement ces résultats. En outre, lorsque les scarabées forment des agrégats, ils sont tous orientés perpendiculairement à la paroi et exercent donc une force importante sur celle-ci. Les chercheurs ont mis à profit cette force en plaçant les scarabées dans une arène aux parois flexibles et mobiles. Combinés avec le comportement collectif des scarabées, ils ont obtenu un dispositif mobile, capable de contourner des obstacles ou rentrer dans des petits espaces. Autant de comportements qui émergent de l’auto-organisation des scarabées et ne requièrent aucun contrôle global de l’ensemble.
Ce travail peut ouvrir une voie intéressante pour l’utilisation d’une multitude de petits ‘robots’ afin d’accomplir une tâche telle une dépollution en milieu dangereux ou une mobilité dans des espaces remplis d’obstacles.
© LOMA (CNRS/Univ. Bordeaux)
En savoir plus
Boundaries control collective dynamics of inertial self propelled robots
A. Deblais, T. Barois, T. Guerin, P. H. Delville, R. Vaudaine, J. S. lintuvuori, J. F. Boudet, J. C. Baret et H. Kellay
Physical Review Letters (2018), doi:10.1103/PhysRevLett.120.188002
Informations complémentaires
Laboratoire ondes et matière d’Aquitaine (LOMA, CNRS/Univ. de Bordeaux)
Centre de recherche Paul Pascal (CRPP, CNRS/Univ. de Bordeaux)